-- © Tous droits réservés 2004 - 2025 --
à la poursuite du Soleil ou même de la Lune
à la poursuite du Soleil ou même de la Lune
|
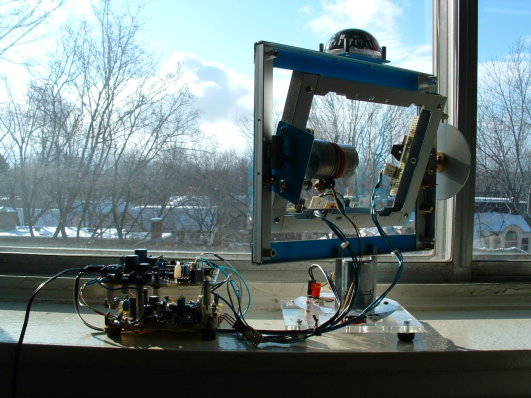
Etude de capteurs de position solaire ultra simples : Sur un système de cadres montés sur doubles cardan à 90°, on ajoute un servomoteur sur chacun des deux axes de liberté, on connecte ces moteurs aux sorties de 2 cartes servo, on équipe chaque cadre d'un capteur de lumière ultra simple relié chacun à l'entrée de la carte correspondante. Les deux axes de liberté sont équipés de rapporteurs pour la mesure d'angles : 180 ° en azimut et 90° en élévation, de plus, un compas magnétique est ajouté sur le dessus du cadre d'azimut comme aide à la calibration. |
 |
 |
1. Le cadre orienté avec ciel dégagé (matinée) 2. Le cadre orienté SW avec ciel couvert (après midi) Lorsqu'il n'y a plus de contraste le système s'immobilise en consommation minimale. (curseur sur l'image) Aspect du montage de démonstration Pour des raisons de rigidité et de simplicité mécanique le moteur d'azimut (axe vertical) et le moteur d'élévation (axe horizontal) sont utilisés en "axe fixe, stator mobile". Le cadre utilitaire "élévation", destiné en première utilisation à porter un panneau solaire (évidemment de bien plus grandes dimensions), comporte les capteurs de positions en azimut et en élévation de la source lumineuse. but de l'expérience : Il est d'évaluer un certain nombre de capteurs optiques de natures différentes, leurs dispositions et leurs arrangements électriques ainsi que le type d'entrée à utiliser sur les cartes servo, ceci afin de réaliser un capteur de position solaire (ou de source de lumière) ultra simple. Au bas du montage on aperçoit le moteur d'azimut. |
Il y a vraiment trop d'ultraviolets ! Ne jamais regarder le soleil à l'oeil nu ou au travers d'instruments optiques : risques de dommages irréversibles aux yeux (cécité) (curseur sur l'image)
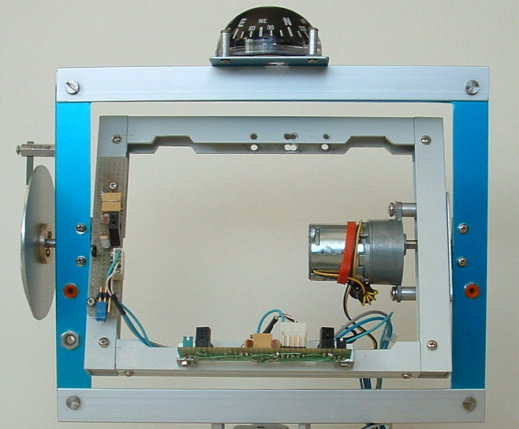
A gauche du cadre "élévation" : le système de captage de la position en élévation, et au bas le système de captage de la position en azimut du soleil. Pour la poursuite du soleil dans les deux dimensions, les photorésistantes montées en pont semblent très efficaces, l'une orientée vers le passé, l'autre vers le futur, de manière à ne jamais faire face au soleil en opération normale, les signaux d'inégalité des valeurs de luminosité initient la contre réaction mécanique des servomoteurs, ramenant les ponts à l'équilibre. Pour un ciel dégagé cet équilibre correspond à la position du soleil à cet instant. Si le ciel est couvert le panneau s'orientera vers la zone la plus lumineuse (moyenne) ce qui est toujours mieux que pas d'orientation du tout... Le meilleur arrangement encore très simple semble être : 2 phototransistors avec lentille hémisphérique contrôlés par une photorésistante d'ambiance ce qui permet d'élargir la plage de fonctionnement aux extrêmes de luminosité. Les servomoteurs sont contrôlés par 2 cartes empilées, alimentation commune et dont les entrées sont configurées : différentielles, basse impédance. Note: la calibration a été faite avec l'aide du freeware Helio V3.2, téléchargé depuis le site: www.petermeadows.com |
Si l'on n'aime pas l'électronique, on peut utiliser une solution verte ... |

|
Retour haut de page
-- © Tous droits réservés 2004 - 2025 --