-- © Tous droits réservés 2004 - 2025 --
Images géométries N°5-6 et N°5 en mode "induction"
 Premier prototype avec la géométrie N°5-6 (mobilité horizontale). De haut en bas de l'objet flottant on trouve : 1 ) circuit oscillateur 50 kHz 2 ) 2 batteries 3 V empilées (6 V) 3 ) un aimant néodyme Ø25x5 mm 4 ) la bobine d'induction accordée sur 50 kHz. |
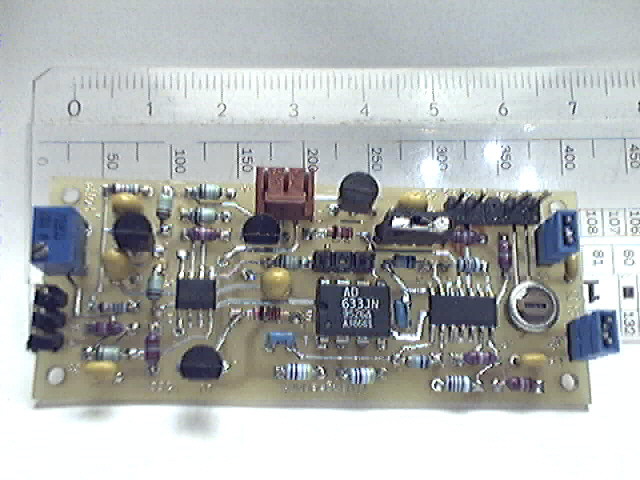
Carte interface de positionnement par induction.
La tête de lecture par induction, appropriée à la géométrie utilisée est reliée a chaque canal via une interface qui génère un signal identique à ce qui serait par exemple le signal d'un capteur opto. Pour ces applications c'est ce procédé qui permet les hauteurs de lévitation les plus importantes (distance). |
 Exemple de positionnement en mode induction (géométrie N°5 - 6 bobines).
Le fait d'obtenir des signaux de localisation très fiables à plus grande distance (que hall) permet un positionnement très solide à distance plus courte. Pour exemple : à une hauteur de lévitation de 20mm on peut arriver à déplacer la base (montée sur pieds en caoutchouc) en tirant sur l'aimant en lévitation. |
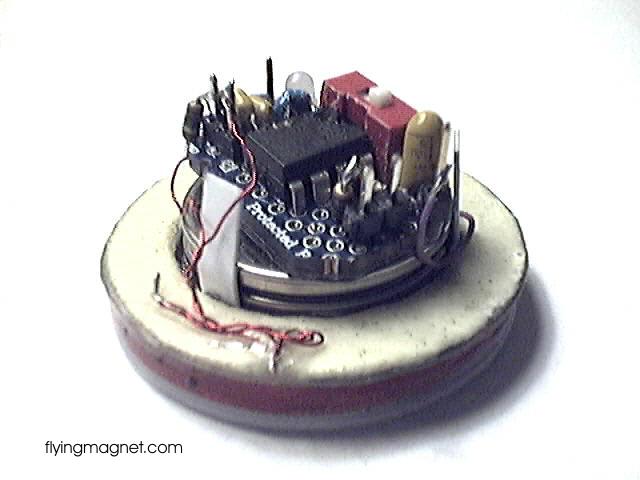 De haut en bas de l'objet flottant on trouve : 1 ) circuit oscillateur 50 kHz 2 ) 2 batteries 3 V empilées (6 V) 3 ) la bobine d'induction positionnée autour de l'aimant flottant |