-- © Tous droits réservés 2004 - 2025 --
Mise en suspension magnétique du gyro autour de l'axe vertical
|
Gyrocompas Cette expérience applique les propriétés physiques du gyroscope telles qu'elles le sont depuis longtemps dans l'équipement de marine, les personnes non impliquées dans ces professions ont peu de chances de rencontrer ces technologies. Plusieurs sites existent autour des mots "gyroscope", "gyrocompas", "gyrocompas". L'expérience s'appuie sur les deux propriétés fondamentales des gyroscopes : rigidité de l'orientation dans l'espace et précession combinées à la gravité et la rotation de la planète. Suspendu à la manière d'un pendule, en rotation dans le sens horaire (vu de l'extrémité Sud) autour de son axe horizontal orienté O-E, donc perpendiculaire au méridien, le gyroscope est libre en rotation autour de son axe vertical et libre de décrire un cône de révolution de 6° d'angle max. limité par le diamètre intérieur de la bobine primaire du transformateur rotatif. La rigidité gyroscopique combinée à la rotation de la Terre dans le sens Ouest-Est amène la force de gravité en dehors de l'axe du pendule en direction de l'Est et conséquemment provoque l'apparition d'un couple sur l'axe horizontal au droit du plan de rotation ; ce couple entraîne la précession du gyroscope à l'Ouest, passé le point neutre du méridien, ce couple diminuera puis s'inversera (bilan de l'énergie potentielle emmagasinée par le pendule) et la précession sera vers l'Est, l'axe de rotation du gyroscope aligné NS, horizontal, correspond à un minimum donc à une position stable... à l'équateur, oui mais à 45° de latitude? Supposons l'amortissement de l'oscillation N/S terminée, le gyro maintenant rigide et sans couple perturbateur va sembler dériver à l'Est conséquence de la rotation du globe et de l'angle formé entre l'axe N-S du gyro et l'axe de rotation de la terre. Des astuces seront nécessaires pour régler ce problème et beaucoup d'autres lorsque l'on placera ce gyroscope à bord d'un vaisseau navigant à vitesse variable, dans une mer déchaînée, à n'importe quel cap, dans les deux hémisphères et que l'on demandera ± 0,5° max. d'erreur. |
|
<>
 |
 |
Modifications (curseur sur image) : |
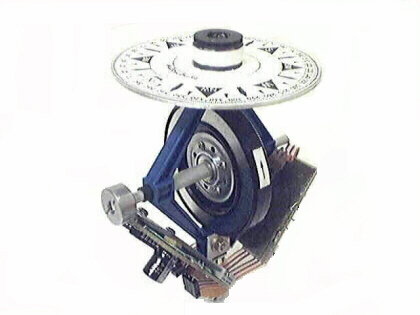
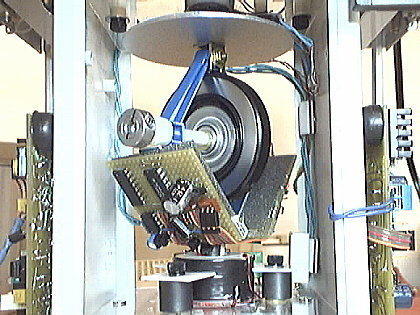
Vue du gyroscope "suspendu" magnétiquement, moteur à l'arrêt, dans sa cage elle même suspendue à la cardan. De chaque coté une carte servo : l'une contrôle la suspension magnétique du gyroscope (en mode "opto") et l'autre adaptée, fournit l'énergie à la bobine primaire du transformateur rotatif. Le système de suspension cardan est celui décrit en début de page, il n'est pas indispensable mais il rend l'expérimentation plus facile : mobilité, pas de soucis de remise a niveau... le nouvel emplacement trouvé, les deux axes de liberté sont verrouillés. (l'expérience doit débuter avec le secondaire du transformateur rotatif bien centrée dans la bobine primaire) Quelques valeurs concernant le gyroscope : Poids total en suspension : 300 g Position du centre de gravité : sur l'axe vertical de symétrie, à environ 72 mm du haut (13 mm en dessous de l'axe de rotation) Volant (partie métallique) : Poids : 82 g Diamètre extérieur : 62 mm ; Diamètre intérieur : 42 mm ; Épaisseur : 9,5 mm . Vitesse de rotation : Réglable de 80t/s à 100 t/s (4800 à 6000 t/min). |
En lévitation, le moteur de disque dur trouve le Nord !
 |
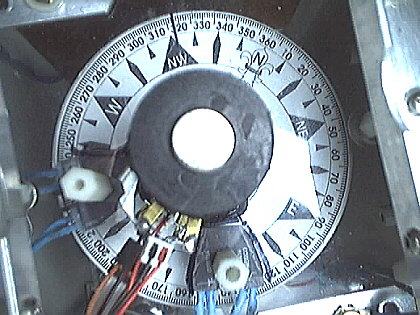 |
Note : Un défaut parmi d'autres de ce montage : le couple de renversement s'applique légèrement décalé de l'axe vertical passant par le centre de gravité du volant... Une masse de 2g non visible, réglable, orientable Nord/Sud a été ajoutée en bas de la structure. |
Après une demi heure, le gyro et sa rose des vents pointent fixement au nord : l'index indique 318°, valeur crédible pour l'orientation du building relevée sur une carte urbaine et aussi confortée par une mesure du Nord magnétique relevé en extérieur. A bord d'un navire c'est plus simple : on dispose pour chaque port de cartes marines sur lesquelles tous les quais sont référencés, il suffit alors d'aligner correctement la coque au long du quai et de comparer le cap donné sur le gyrocompas avec la valeur donnée par la carte pour l'emplacement correspondant (de plus on a aucun doute sur la qualité du gyrocompas...) Note : Cette expérience n'est pas facile et demande une certaine précision dans sa réalisation mécanique : répartition des masses, alignements des axes, les symétries, réglage du système d'amortissement éventuel, etc. Le fichier de la rose des vents en [.pdf] |
-- © Tous droits réservés 2004 - 2025 --